交流伺服电动机定子的构造基本上与电容分相式单相异步电动机相似.其定子上装有两个位置互差90°的绕组,一个是励磁绕组Rf,它始终接在交流电压Uf上;另一个是控制绕组L,联接控制信号电压Uc。所以交流伺服电动机又称两个伺服电动机。
交流伺服电动机的转子通常做成鼠笼式,但为了使伺服电动机具有较宽的调速范围、线性的机械特性,无“自转”现象和快速响应的性能,它与普通电动机相比,应具有转子电阻大和转动惯量小这两个特点。目前应用较多的转子结构有两种形式:一种是采用高电阻率的导电材料做成的高电阻率导条的鼠笼转子,为了减小转子的转动惯量,转子做得细长;另一种是采用铝合金制成的空心杯形转子,杯壁很薄,仅0.2-0.3mm,为了减小磁路的磁阻,要在空心杯形转子内放置固定的内定子.空心杯形转子的转动惯量很小,反应迅速,而且运转平稳,因此被广泛采用。
交流伺服电动机在没有控制电压时,定子内只有励磁绕组产生的脉动磁场,转子静止不动。当有控制电压时,定子内便产生一个旋转磁场,转子沿旋转磁场的方向旋转,在负载恒定的情况下,电动机的转速随控制电压的大小而变化,当控制电压的相位相反时,伺服电动机将反转。
交流伺服电动机的工作原理与分相式单相异步电动机虽然相似,但前者的转子电阻比后者大得多,所以伺服电动机与单机异步电动机相比,有三个显著特点:
由于转子电阻大,其转矩特性曲线所示,与普通异步电动机的转矩特性曲线相比,有明显的区别。它可使临界转差率S0>1,这样不仅使转矩特性(机械特性)更接近于线性,而且具有较大的起动转矩。因此,当定子一有控制电压,转子立即转动,即具有起动快、灵敏度较高的特点。
正常运转的伺服电动机,只要失去控制电压,电机立马停止运转。当伺服电动机失去控制电压后,它处于单相运作时的状态,由于转子电阻大,定子中两个相反方向旋转的旋转磁场与转子作用所产生的两个转矩特性(T1-S1、T2-S2曲线)以及合成转矩特性(T-S曲线)
交流伺服电动机的输出功率一般是0.1-100W。当电源频率为50Hz,电压有36V、110V、220、380V;当电源频率为400Hz,电压有20V、26V、36V、115V等多种。
交流伺服电动机运行平稳、噪音小。但控制特性是非线性,并且由于转子电阻大,损耗大,效率低,因此与同容量直流伺服电动机相比,体积大、重量重,所以只适用于0.5-100W的小功率控制系统。
伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值作比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。
伺服电动机在伺服系统中控制机械元件运转的发动机.是一种补助马达间接变速装置。又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特征是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降,作用:伺服电机,可使控制速度,位置精度非常准确。
有刷电机成本低,结构相对比较简单,启动转矩大,调速范围宽,控制容易,要维护,但维护方便(换碳刷),产生电磁干扰,对环境有要求。因此它能够适用于对成本敏感的普通工业和民用场合。
无刷电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。控制复杂,容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。电机免维护,效率很高,运行温度低,电磁辐射很小,长寿命,可用在所有环境。
交流伺服电机也是无刷电机,分为同步和异步电机,目前运动控制中一般都用同步电机,它的功率范围大,能做到很大的功率。大惯量,最高转动速度低,且随着功率增大而快速降低。因而适合做低速平稳运行的应用。
伺服电动机伺服电动机又叫执行电动机,或叫控制电动机。在自动控制系统中,伺服电动机是一个执行元件,它的作用是把信号(控制电压或相位)变换成机械位移,也就是把接收到的电信号变为电机的一定转速或角位移。其容量一般在0.1-100W,常用的是30W以下。伺服电动机有直流和交流之分。
一、交流伺服电动机交流伺服电动机定子的构造基本上与电容分相式单相异步电动机相似,如图1所示。其定子上装有两个位置互差90°的绕组,一个是励磁绕组Rf,它始终接在交流电压Uf上;另一个是控制绕组L,联接控制信号电压Uc。所以交流伺服电动机又称两个伺服电动机。
交流伺服电动机的转子通常做成鼠笼式,但为了使伺服电动机具有较宽的调速范围、线性的机械特性,无“自转”现象和快速响应的性能,它与普通电动机相比,应具有转子电阻大和转动惯量小这两个特点。目前应用较多的转子结构有两种形式:
一种是采用高电阻率的导电材料做成的高电阻率导条的鼠笼转子,为了减小转子的转动惯量,转子做得细长;
另一种是采用铝合金制成的空心杯形转子,杯壁很薄,仅0.2-0.3mm,为了减小磁路的磁阻,要在空心杯形转子内放置固定的内定子,如图2所示。空心杯形转子的转动惯量很小,反应迅速,而且运转平稳,因此被广泛采用。
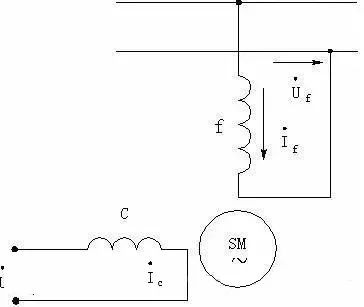
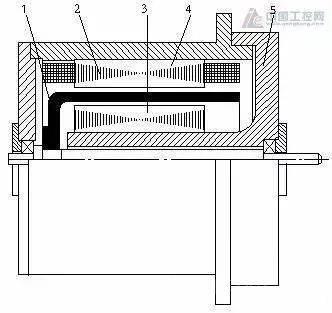
图2空心杯形转子伺服电动机结构交流伺服电动机在没有控制电压时,定子内只有励磁绕组产生的脉动磁场,转子静止不动。当有控制电压时,定子内便产生一个旋转磁场,转子沿旋转磁场的方向旋转,在负载恒定的情况下,电动机的转速随控制电压的大小而变化,当控制电压的相位相反时,伺服电动机将反转。
交流伺服电动机的工作原理与分相式单相异步电动机虽然相似,但前者的转子电阻比后者大得多,所以伺服电动机与单机异步电动机相比,有三个显著特点:
1、起动转矩大由于转子电阻大,其转矩特性曲线所示,与普通异步电动机的转矩特性曲线相比,有明显的区别。它可使临界转差率S0>1,这样不仅使转矩特性(机械特性)更接近于线性,而且具有较大的起动转矩。因此,当定子一有控制电压,转子立即转动,即具有起动快、灵敏度较高的特点。
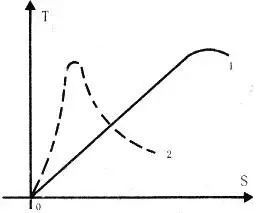
2、运行范围较宽如图3所示,较差率S在0到1的范围内伺服电动机都能稳定运转。
3、无自转现象正常运作的伺服电动机,只要失去控制电压,电机立马停止运转。当伺服电动机失去控制电压后,它处于单相运作时的状态,由于转子电阻大,定子中两个相反方向旋转的旋转磁场与转子作用所产生的两个转矩特性(T1-S1、T2-S2曲线)以及合成转矩特性(T-S曲线所示,与普通的单相异步电动机的转矩特性(图中T′-S曲线)不同。这时的合成转矩T是制动转矩,从而使电动机迅速停止运转。
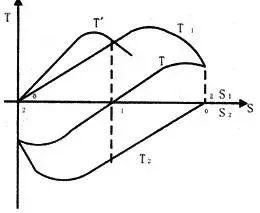
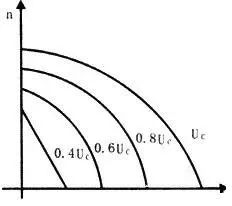
图5是伺服电动机单相运行时的机械特性曲线。负载一定时,控制电压Uc愈高,转速也愈高,在控制电压一定时,负载增加,转速下降。
交流伺服电动机的输出功率一般是0.1-100W。当电源频率为50Hz,电压有36V、110V、220、380V;当电源频率为400Hz,电压有20V、26V、36V、115V等多种。交流伺服电动机运行平稳、噪音小。但控制特性是非线性,并且由于转子电阻大,损耗大,效率低,因此与同容量直流伺服电动机相比,体积大、重量重,所以只适用于0.5-100W的小功率控制系统。
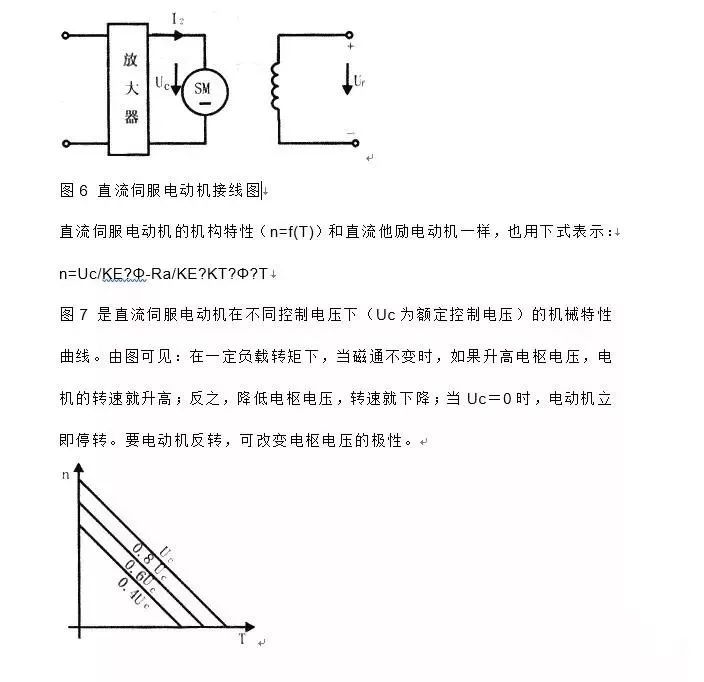
二、直流伺服电动机直流伺服电动机的结构和一般直流电动机一样,只是为了减小转动惯量而做得细长一些。它的励磁绕组和电枢分别由两个独立电源供电。也有永磁式的,即磁极是永久磁铁。一般会用电枢控制,就是励磁电压f一定,建立的磁通量Φ也是定值,而将控制电压Uc加在电枢上,其接线直流伺服电动机的n=f(T)曲线直流伺服电动机和交流伺服电动机相比,它具有机械特性较硬、输出功率较大、不自转,起动转矩大等优点。
交流伺服电机的定子装有三相对称的绕组,而转子是永久磁极。当定子的绕组中通过三相电源后,定子与转子之间必然产生一个旋转场。这个旋转磁场的转速称为同步转速。电机的转速也就是磁场的转速。
由于转子有磁极,所以在极低频率下也能旋转运行。所以它比异步电机的调速范围更宽。而与直流伺服电机相比,它没有机械换向器,特别是它没有了碳刷,完全排除了换向时产生火花对机械造成的磨损,另外交流伺服电机自带一个编码器。
可以随时将电机运行的情况“报告”给驱动器,驱动器又根据得到的“报告”更精确的控制电机的运行。由此可见交流伺服电机优点确实很多。可是技术上的含金量也高了,价格也高了。最重要是对交流伺服电机的调试技术提高了。也就是电机虽好,如果调试不好一样是问题多多。
伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值作比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线.什么是伺服电机?有几种类型?工作特点是什么?
答:伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特征是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降,请问交流伺服电机和无刷直流伺服电机在功能上有什么区别?
答:交流伺服要好一些,因为是正弦波控制,转矩脉动小。直流伺服是梯形波。但直流伺服最简单,便宜。永磁交流伺服电动机20世纪80年代以来,随着集成电路、电力电子技术和交流可变速驱动技术的发展,永磁交流伺服驱动技术有了突出的发展,各国著名电气厂商相继推出各自的交流伺服电动机和伺服驱动器系列新产品并逐渐完备和更新。
交流伺服系统已成为当代高性能伺服系统的主要发展趋势,使原来的直流伺服面临被淘汰的危机。90年代以后,世界各国已经商品化了的交流伺服系统是采用全数字控制的正弦波电动机伺服驱动。交流伺服驱动装置在传动领域的发展日新月异。永磁交流伺服电动机同直流伺服电动机比较,主要优点有:
⑴无电刷和换向器,因此工作可靠,对维护和保养要求低。⑵定子绕组散热比较方便。
三相交流伺服电机应用广泛,但经过长时间运行后,会发生各种故障。及时判断故障原因,进行相应处理,是防止故障扩大,保证设备正常运行的一项重要工作。 01 电机编码器报警 01故障原因 ①接线错误; ②电磁干扰; ③机械振动导致的编码器硬件损坏; ④现场环境导致的污染; 02故障排除 ①检查接线并排除错误; ②检查屏蔽是不是到位,检查布线是不是合理并解决,必要时增加滤波器加以改善; ③检查机械结构,并加以改进; ④检查编码器内部是否受到污染、腐蚀(粉尘、油污等),加强防护; 03安装及接线标准 ①尽量使用原装电缆; ②分离电缆使其尽量远离污染接线,特别是高污染接线; ③尽可能始终使用内部电源。若使用开关电源,则应使用滤波器,确保电源达到
框图 /
在本教程中,我们将使用 ARM7-LPC2148 控制伺服电机。伺服电机比步进电机具有低功耗的优势。当到达所需位置时,伺服电机停止其功耗,但步进电机继续消耗功率以将轴锁定在所需位置。伺服电机大多数都用在 机器人项目 ,因为它们的准确性和易于操作性。 伺服电机 伺服电机 是直流电机、位置控制管理系统和齿轮的组合。 伺服电机的旋转是通过向其施加PWM信号来控制的,PWM信号的宽度决定了电机的旋转角度和方向。在这里,我们将在本教程中使用 SG90 伺服电机 ,它是最受喜爱和最便宜的电机之一。SG90 是 180 度伺服。所以有了这个伺服,我们大家可以将轴定位在 0-180 度之间: 工作电压:+5V 齿轮类型:塑料 旋转角度:0 至 180
的教程 /
对于电气等专业的朋友而言,电机属于常见设备。在前面的文章中,我们对伺服电机以及力矩电机有所介绍。为增进大家对电机的认识和了解,本文将对变频电机予以介绍,主要在于阐述变频电机的原理和接线。如果你对电机相关知识具有兴趣,不妨继续往下阅读哦。 一、变频电机原理 变频电机是指在标准环境条件下,以100%额定负载在10%~100%额定速度范围内连续运行,温升不会超过该电机标定容许值的电机。 随着电力电子技术及新型半导体器件的迅速发展,交流调速技术获得不断的完善和提高,逐步完善的变频器以其良好的输出波形、优异的性能价格比在交流电机上得到普遍应用。例如:钢厂用于轧钢的大型电动机和中、小型辊道电动机、铁路及城市轨道交通用牵引电机、电梯电机
引言 开放式控制器体系结构源于“开放式”的PC(个人计算机) 技术, 目前的开放式运动控制器多为PC+运动控制卡结构, 随着MCU(微控制器) 和DSP(数字信号处理器)性能的增强, MUC和DSP取代PC的趋势日趋明显, 而这种嵌入式的紧凑结构较PC有更广泛的环境适应性。MCU、DSP和PC差异较大, PC环境中的运动控制技术不可能直接向MCU和DSP系统中转移, 基于MCU和DSP硬件平台的运动控制技术的研究十分必要。 设计目标与需求分析 运动控制管理系统发展趋势 在开放式控制器技术的推动下, 运动控制管理系统由传统的封闭式结构朝着开放、可重构、网络化方向发展。按照《开放式数控系统第1 部分: 总则》(GB/
框图 /
当前国内机器人发展迅猛,尤其是工业机器人领域。但在机器人的反应速度、精度上,国内外产品还是存在一定差距的,那么关键点是在哪呢? 重点是机器人的核心零部件 伺服电机。机器人在运行过程中,是通过伺服电机的驱动实现多自由度的运动的。如果对机器人运行的动作速度、精度要求高的话,实际就是要求伺服电机的响应速度、控制精度要足够高。 而在机器人实际运行时,往往伺服电机是处于各种加减速、正反转状态,那就对伺服电机的短时过载能力、惯量适应范围、频率响应带宽、转速/扭矩响应时间提出了很高的要求。 其中一个很重要的指标就是频率响应带宽,它决定了该伺服系统对指令的响应速度快慢,是机器人设计者的重要关注指标。 伺服电机频率响应带宽的
的响应性能 /
商用旋变与伺服电机电角度相位的对齐方法大致上可以分为以下几个步骤: 1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出; 2.然后用示波器观察旋变的SIN线.依据操作的方便程度,调整电机轴上的旋变转子与电机轴的相对位置,或者旋变定子与电机外壳的相对位置; 4.一边调整,一边观察旋变SIN信号的包络,一直调整到信号包络的幅值完全归零,锁定旋变; 5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,信号包络的幅值过零点都能准确复现,则对齐有效 。 撤掉直流电源,进行对齐验证: 1.用示波器观察旋变的SIN信号和电机的UV线.转动电机轴
直播回放: 国产芯 - 先楫800MHz RISC-V MCU高能秀,岂止控4只伺服电机
MPS电机研究院 让电机更听话的秘密! 第一站:电机应用知识大考!跟帖赢好礼~
电源小课堂 从12V电池及供电网络优化的角度分析电动汽车E/E架构的趋势
2月5日消息,AMD线程撕裂者竖起了工作站、发烧桌面处理器的天花板,Intel至强虽然无力抗衡,但也不能放弃,只是实力所限,提升有点慢,下一 ...
DevEco Studio 4.1带来多种调试能力,助力鸿蒙原生应用开发高效调试
目前,HarmonyOS NEXT星河预览版已经正式面向开发者开放申请,面向鸿蒙原生应用及元服务开发者提供的集成开发环境——DevEco Studio也迎 ...
英特尔 Thread Director 技术助力,Linux 用户运行 Windows 虚拟机性能提升 14%
2 月 5 日消息,去年 10 月,微软发布了一份指南,鼓励 Windows 用户通过 WSL 尝试 Linux,这多少让人有些意外。而如果你是一位 ...
不支持超线,新款英特尔 Arrow Lake-S 芯片样品现身测试数据库
2 月 3 日消息,消息人士 InstLatX64 近日在 X 平台分享了一条来自英特尔测试机数据库的信息,称发现了一款不支持超线 ...
智能家居是在物联网的影响之下物联化体现。智能家居通过物联网技术将家中的各种设备(如音视频设备、照明系统、窗帘控制、空调控制、安防系 ...

嵌入式操作系统开发相关FPGA/DSP总线与接口数据处理消费电子工业电子汽车电子其他技术存储技术综合资讯论坛电子百科词云:

