发布时间:2023-11-30 00:19:58 人气:141 次 来源:m6米乐网址最新版本
一周前,波士顿动力的Atlas人形机器人再次震撼全球。根据官方视频,Atlas连贯跨越圆木、在左右摆放不齐的40cm台阶上灵巧地完成三级跳,这一系列骚操作对于机器人来说,其难度可丝毫不亚于武打片中江湖人士的蹿房越脊、飞檐走壁,仿佛《西部世界》降临人间,让我们对于机器人产生了更多的遐想与期待。
正如公司宗旨所述:Changing your idea of what robots can do,波士顿动力专注于机器人,尤其是足式机器人的开发制造。据工研院IEK的研报预估,2021年全球智能机器人的市场规模将达336亿美元,而当下轮式、履带式及固定型机器人占据了机器人市场的绝对地位,能够入场的商业化足式机器人则是少之又少、屈指可数。这也难怪去年6月9日,软银会在继收购Aldebaran(著名智能机器人NAO、Pepper、Romeo均出自该公司)、AGI(从事以感性控制技术为核心的感性控制解决方案与语音识别解决方案)、Asratec(V-Sido系列新产品的策划、设计、开发、销售、咨询)、Cocoro SB(专注机器人服务)后再度出手,一举拿下谷歌母公司Alphabet 旗下的机器人公司波士顿动力及 Schaft。


事实上「机器人」一词早在1920年就由捷克斯洛伐克作家卡雷尔·恰佩克(KarelCapek)提出,自此机器人开始漫长的发展进程,但以往我们对机器人的认知大多只停留在「移动的电脑」这一层面,即仅能根据预先设定的程序指令进行简单而重复的操作。而成立于1992年的波士顿动力公司则彻底颠覆人们的认知,旨在打造像人或动物一般能够在现实世界中灵活工作的智能机器人。
波士顿动力企业成立至今,吸引了众多来自世界各大院校的顶尖科研人才。波士顿动力之所以具备如此强大的号召力,其创始人马克·雷波特(Marc Raibert)功不可没。与比尔·盖茨、扎克·伯格等同样出身名校,因发现商业机会提前辍学的科技先锋不同,1949年出生的马克·雷波特是典型的学院派创业者。1977年马克·雷波特在MIT获得博士学位,三年后在卡耐基·梅隆大学创立CMU leg实验室并担任副教授一职。1986年马克·雷波特重新再回到MIT任电子工程与计算机科学系教授,继续从事机器人开发和研究工作。1992年马克·雷波特离开MIT与他人一同创办波士顿动力,起初为美国陆军提供机器人制造服务,后又拓展至包括美国国防高级研究计划局(Defense Advanced Research Projects Agency,DARPA)在内的诸多军方机构。而如今,波士顿动力发布过的机器人已经深深印刻在了寻常百姓的脑海之中。

据公司官网数据,目前波士顿动力旗下机器人品类丰富,共有包括Atlas在内的九款机器人可在不同的工作条件与环境下提供差异化服务,另外八款机器人分别为BigDog、LS3、Wild Cat、Spot、Spot Mini、RHex、Handle 和 Sand Flea。

首先我们的角度来看一看本文主角Atlas。Atlas是波士顿动力双足机器人的独苗,也是其原先在谷歌旗下的巅峰之作。
Atlas是由早期的Petman进化而来。Petman是一个设计用于检测化学防护服的人形机器人,能模拟现实条件下防护服对士兵的保护。不同于以往的化学防护服测试,Petman可以在一定程度上完成防护服内的自身平衡与躯体弯曲,还能暴露在充满化学制剂的操作车间实施各种能对化学防护服产生压力作用的健美体操。更神奇的是,Petman还能依据人体生理学来模拟防护服内人体的温度、湿度和排汗量,使得测试条件更为逼真。但美中不足的是Petman的运动能力实在有限,这也促使波士顿动力研究怎么样将Petman朝着Atlas的方向改进。

截止目前,波士顿动力已将Atlas更新至第六版,回顾其五年的发展历史,我们也许会那么有一刻的恍惚,联想起人类的起源与进化吧。

第一代Atlas由航空级铝和钛建造,高约1.8米,重150kg,有液压驱动的四肢,配备蓝光LED照明。它的手具有精细动作技能的能力,四肢共具28个自由度。
要说第一代Atlas的主要特征,首先它需要一根长线进行供电,可以在实验室环境中走过铺满石块的道路,并保持身体平衡;其次在实验室环境中引入适当的外部撞击,Atlas能够保持单脚站立、屹立不倒;再有便是Atlas在履带上行走时会在踩到障碍物时自动更新步态;最后就是野外环境也能保持较好的平衡性。
为了参加2015年6月DARPA的机器人挑战赛,Atlas完成了它的第一次进化。而这一次进化相对彻底,全身的75%都被重新设计,仅有小腿和脚沿用上一版。升级后的Atlas高约1.88米,重约156.5kg。新设计使Atlas变得更强壮、快速和安静,在比赛中能够应对专为人类设计的空间。同时得益于身后的电池大背包,第二代Altas已经脱离了电缆的束缚。
第二代Atlas的供电系统是板载3.7千瓦时的锂离子电池组,在完成包括行走、站立和使用工具等动作的条件下能续航一小时。


第三代Atlas的动力与第二版一样,还是采用电源供电和液压驱动,只不过它的头上配备了通过激光雷达与3D视觉技术所实现的SLAM系统,可以使其规避障碍物、探测地面状况以及完成巡航任务。第三版Atlas高约1.75米,重约82kg,在体型上均较上一代有所削减,提升了轻便度。
第三代Atlas最令人震撼的还是摔倒之后自我调整起身的能力。当时在该功能层面,Atlas可谓无可匹敌。

前三代Atlas在底层技术层面打下坚实基础,所以此后的三代更多是在应用层面的拓展,发生的时间点也相对明确。2017年11月,第四代Atlas实现双腿立定跳远、跳高和后空翻;2018年5月,第五代Atlas实现软地面跑步以及单腿跳跃功能;而正如开篇所述,一周前的10月12日,第六代Atlas已能在40cm的台阶上完成左右替的三级跳。
在波士顿动力现存的九款机器人中,四足机器人就独占五席,这与军方需求紧密关联。波士顿动力长期与美国国防部高级研究项目局合作,部分研究经费也是由DARPA资助。众所周知,军工领域的制造规范远高于民用领域,这样的高标准、严要求倒逼波士顿动力在四足机器人的道路上不断革新,创造了Big Dog、LS3、Wild Cat、Spot四款旨在应用于军事的产品。
而在2014年,美国军方宣布决定不采用其与当时还是谷歌子公司的波士顿动力合作研发的四足机器人,因此Spot之后的Spot Mini其设计更多地从仓储或物流的角度加以考虑。
Big Dog被人们亲切地称为「大狗」,是波士顿动力公司于2005年推出的一款四足机器人,也正是这款四足机器人让波士顿动力公司名声大噪。大狗抛开传统的轮式或履带式机器人,转而研究四足机器人,是因为四足机器人能适应更多地形地貌,性能更为优越。
在公司发布的宣传视频中,Big Dog在装载着重物的情况下,仍能对人类从其侧面的踢踹做出灵敏反应,从始至终保持站立姿态。

Big Dog高约1米,重约109kg,可以背负45kg的有效负载进行自由行走或奔跑,最快移动速度可达6.4km/h,最大爬坡角度可达35°。同时Big Dog能适应多种复杂路况,即便在雪地或泥洼中也能行走自如,就算有人在其侧面施加外力,Big Dog也能迅速调整四足动作,保持身体稳定,避免摔倒。它之所以具备如此强大的能力,离不开其精巧的设计结构和缜密的计算系统。Big Dog以四足哺乳动物的躯体结构为参考,采用机械方式来进行组装,四肢具备的关节型结构可以有效吸收冲击,起到减震作用,16个自由度可以让它在横纵两个方向自由移动。Big Dog由一台汽油发动机提供动力,发动机驱动液压系统,以液压系统作为驱动输出动力,进而控制每段肢体的动作,实现了躯体的灵活运动。
尽管Big Dog拥有强大的功能,但由于其运行过程中噪音较大,最终没有被美国军方采用。
LS3又被称为「阿尔法狗」,注意这可不是击败李世石的AlphaGo,其中「LS」是「Legged Squad」的缩写。LS3是波士顿动力公司继Big Dog后推出的一款新型四足机器人,于2012年首次公开亮相。与Big Dog相比,LS3的体型更为庞大,负载能力更强,移动速度也更快,实用能力有了大幅提升。
在公司发布的宣传视频中,LS3在装载着重物的条件下,仍能灵敏地爬上山坡或通过崎岖的烂路。
LS3高约1.7米,重约590kg,可以背负181kg的有效负载进行自由行走和奔跑。在一次平地测试中,LS3曾创下背负500kg负载进行自由行走的纪录。最快移动速度可达45km/h,实际应用时LS3可在崎岖的山路中依然保持较快前进速度。LS3具有12个自由度,由燃气发动机或柴油发动机提供动力,进而驱动液压系统输出,控制每段肢体的动作,实现躯体的灵活运动。在燃料充足的条件下,LS3可运行24小时,最远行驶里程可达32km。

LS3参与了美国军方的作战训练任务,但由于其自身运行噪音问题没有正真获得有效解决,且故障维修难度较大,终究是遭到美国军方弃用。
Wild Cat又称「野猫机器人」,是波士顿动力于2013年推出的一款四足机器人,迭代了其前身Cheetah,即「猎豹机器人」。此前Cheetah尽管在跑步机上创造了48km/h的机器人奔跑记录,但其躯体需连接多根线缆,仅能在实验室中运行,应用能力十分有限。
而在宣传视频中,Wild Cat则可以在户外敏捷地奔跑,且能够轻松跳过障碍物,甚至在奔跑过程中实现急停、掉头等操作,因此我们大家可以将Wild Cat看做是Cheerah的「无线版本」,解锁了实验室这一特定场景的束缚。
Wild Cat高约1.17米,重约154kg,最快移动速度可达32km/h。Wild Cat能适应多种地形,在复杂路况下仍能以16km/h左右的速度保持前行。此外,Wild Cat还能实现快速跳跃和转身的动作,相较于Big Dog和LS3而言,灵活性大幅度的提高。Wild Cat具有14个自由度,由一台甲醇发动机提供动力,发动机驱动液压系统,以液压系统作为驱动输出动力,进而控制每段肢体的动作,实现躯体的灵活运动。


虽然Wild Cat采用甲醇发动机,但运行噪音依然较大。未来若采取电池能源提供动力,Wild Cat能轻松实现低噪奔跑,提高其自身隐蔽性,在战场上发挥出色作用。
至此波士顿动力已经先后研发了Big Dog、LS3和Wild Cat三款四足机器人,无一例外都受到噪音问题的干扰,使用范围有限。波士顿动力充分总结经验教训,于2015年打造了一款名为「Spot」的新型四足机器人。
Spot高约0.94米,重约75kg,可背负45kg的有效负载自由奔跑,两条肢体能够在原地跳跃而不摔倒,上下楼梯也十分灵活。从官方发布的视频来看,相较于Big Dog,12个自由度使得Spot在步伐灵敏度与爬坡速度方面均具有优越。而对于令人头疼的噪音问题,Spot采取电池能源的供电举措,有效地控制了运行噪音。

大家对于Spot Mini这一个名字可能并不熟悉,但要是说起2018年初那个用头部开门并且谦逊让路的机器人,恐怕就是无人不知、无人不晓了。没错,它就是目前波士顿动力四足机器人的最新款:Spot Mini!


从外形上看,Spot Mini很像电影《黑镜》中「Metalhead」一集中出现的机器人。Spot Mini 于 2017 年 11 月对外亮相,与 Spot 相比 Spot Mini 的外形更加小巧,并且在头部增设了一副机械臂,机械臂的顶端是一个夹手,可以灵活操控物体。
Spot Mini高约0.84米,重约30kg,可背负14kg的有效负载自由奔跑。与Spot相同,Spot Mini也采取电池能源提供动力,但在单次运行时间方面有了较大提升,满电状态下可运行约90分钟。
Spot Mini几乎继承了Spot的所有移动特性,具有17个自由度,其中的5个位于顶部机械臂之上,剩余12个均匀分布于四肢。机械臂的作用不仅在于操纵物体,还可以在Spot Mini跌倒时辅助其重新站立。不仅如此,Spot Mini的机械臂上还搭载了摄像头,有助于帮助机械手准确地找到目标物体。
而就在10月17日,Spot Mini再放大招,它跟随着音乐《Uptown Funk》自动尬舞,举手投足间还颇带几分性感,真是顶胯、扭臀、摇摆,根本停不下来啊!


据悉Spot Mini将于2019年实现量产,这也是软银收购波士顿动力以来第一次面临市场检验。波士顿动力创始人马克·雷波特表示,2019年7月以前,公司将以每年近千台的速度生产Spot Mini。目前Spot Mini正在测试其建筑、运输、安全和家庭援助方面的应用。
相比于其他足式机器人,波士顿动力的RHex则是能适应各种越野环境的「跑酷老司机」。
RHex高约0.14米,重约12kg,全身仅有的6个自由度全部奉献给了腿部,这造就了他那6条可旋转的机械腿,具有与蜥蜴一样优秀的运动功能。RHex拥有专门的抗击打设计,防水能力强,可穿越各种复杂地形。与蜥蜴类似,RHex可以轻松跳跃沟槽、攀爬矮墙,甚至是180°的跳跃翻身。
Handle是波士顿动力研发的首款足+轮式机器人,身高接近2米,纵跳可达1.2米,轮子可以以14km/h的速度前进。整个机器人由电池供能,驱动电机和液压泵。无需外接设备,一次充电续航24km。Handle能够轻松越过障碍物,无论是在斜坡还是有障碍物的环境都表现出很好的柔性。Handle的成功代表着波士顿动力将机器人的混合控制技术带到了新的高度。

Sand Flea是一款重量仅有约5kg的侦察机器人。在平地上它能像遥控模型车一样飞驰。最重要的是,为躲避障碍物Sand Flea能够跳起约9.1米高,轻而易举地越过一面复合墙、屋顶或者一组楼梯,也难怪有人会称它为「跳蚤」了。

在跳跃的滞空阶段,Sand Flea的内置陀螺仪能够使其保持水平状态,为机载摄像机提供清晰的视角,同时为其平稳着陆提供保障。该款机器人续航能力极强,每完整充电一次可供其完成弹跳25次。美国军方为该项目的研发提供了专项资金支持。
看着别人家机器人品类丰富、活蹦乱跳,大有赶超人类之势,我们不禁会问此类机器人,尤其是足式机器人的技术难点究竟在何处?要回答这一问题就一定要明白机器人的底层控制技术,大致包括液压伺服控制、步态曲线生成与知觉柔顺控制这三个方面。
首先要提的便是电液伺服系统。一个直观的感受就是,当你看到Altas完成三级跳时,你会惊讶于Altas起跳瞬间所展现出的爆发力。根据牛顿第二定律:F=ma,起跳瞬间的加速度需要外力加持,在Altas腿部狭小的操作空间里需要创造何种驱动才能在起跳瞬间支撑起它那75kg的躯体?答案就是电液伺服系统。波士顿动力的九款机器人中,Altas、Big Dog、LS3、Wild Cat、Spot和Handle都涉及此控制技术。各位可不要小看从双腿起跳到单腿起跳的更新,因为这足足增加了一倍的驱动力!Atlas Version 4到Version 5的迭代仅用了半年时间,足以说明波士顿动力过硬的研发实力。
在电液伺服系统之前,几乎所有的机器人都由电机驱动,因为该技术易于实现,不需要仔细考虑油源、油路的问题,接通电线就能运转。但电机驱动的主体问题便是功率体积比小,即同样大小的驱动机构,电机的输出功率与液压缸相比能够说是微不足道。举例来说,要带动75kg的负载所需液压缸的体积可能类似于一个铅笔盒,而采用电机的话或许已经快赶上Altas的躯干了,因此采用液压缸作为执行机构是增大负载能力的关键。

那么电液伺服系统的进入壁垒很高?答案是否定的。事实上电液伺服系统属于一门成熟技术,最多只是之前没想到将液压缸用在机器人身上罢了。这一技术对于国内高校而言不算难点,追赶波士顿动力不成问题。
其次要说一说步态曲线的生成。相信看过视频的童鞋们对Atlas左右交替的步态记忆犹新,其协调性与平衡性令人叹为观止。Altas横向移动的平衡涉及顶层的姿态规划和底层的步态控制,这里我们主要来看一下后者。
步态曲线生成的问题是Altas的技术难点,因此波士顿动力从未对外透露其步态的任何细节。它到底采用的是何种步态曲线?是摆线还是贝塞尔?是否使用中枢模式发生器(CPG)?怎么样才能解决自由度冗余?这样一些问题都还是未知数,我们只可以靠自己的理解在现有平台上进行模拟试验。
当然上面说的还只是正常行走时的步态,在不同路况环境、不同扰动冲击、不同走路的速度下怎么样做步态切换,切换成何种步态更加是难点中的难点。因此在步态曲线生成方面,国内还没有一点一家机构的机器人产品能够与波士顿动力匹敌。
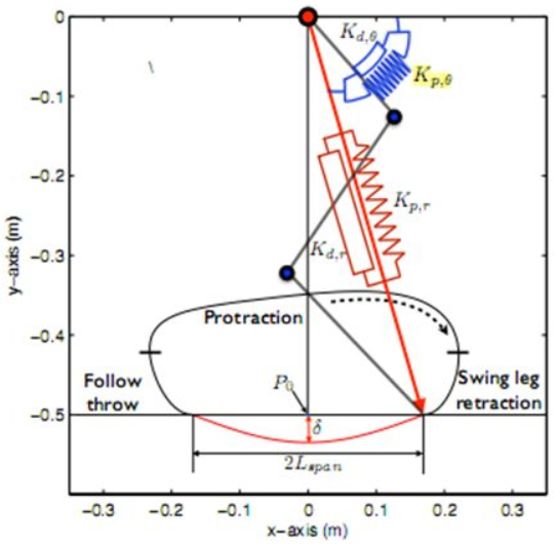
最后要谈一谈主被动柔顺性控制。乍一听感觉高大上,实际上就是针对行走时反作用力的控制。根据牛顿第三定律:力的作用是相互的,无论是人还是机器人,脚着地时地面就会给脚一个反作用力。假如没有一个合理对冲反作用力的机制,平衡就难以保障。对于人类而言,韧带和关节能够吸收这种反作用力,而对于机器人,倚仗的就是知觉柔顺控制,即力感知与控制。
根据控制的主动性划分,我们大家可以将柔顺控制管理系统分为主动柔顺控制和被动柔顺控制,我们先来看一看被动柔顺控制。被动柔顺控制的含义是对于反作用力的减小是被动的,无法调节,说白了就是在足端安装一个固定弹性系数的弹簧。讲到这大家可能也会猜到主动柔顺控制是什么了,没错,就是足端安装一个可变弹性系数的弹簧。当然真实的操作中如果只有弹簧我们还会发现别的问题,但大致的原理是如此。通过主动柔顺性控制与被动柔顺性控制的结合,整个机器人的腿部可以等价成弹簧和阻尼,在触地的过程中很好地吸收了地面的反作用力,使得机器人在行走时具备平衡性与协调性。
那么知觉柔控制难度如何?说难不难,说易也不易。不难是因为目前国内已有实现,不易是因为实现的效果不佳。其实如果我们仔仔细细地观察,Atlas 在完成跳跃动作触地的一刹那,腿还是会微微地上下抖动,这说明波士顿动力在主动柔顺性控制方面也并没做到特别完美。

另外机器人的底层技术除了操控方法以外,还包括机器人的架构问题,比如机械结构、液压油路设计、传感器配置、能源供给、散热等等。可以说一个机器人是一项系统工程,任何一项技术的不合理或者不合格运用都将导致整体的失败。
夸了波士顿动力这么多,那有没有连它都解决不了的问题?当然有啊!不然Google为何要急于出售?足式机器人为何市场占有率如此可怜?
相较于轮式机器人,因关节灵活度等方面的要求,足式机器人的硬件成本高昂,这还不包括后续的算法跟进。波士顿动力旗下的足式机器人,其成本无一不是百万美元级别。再例如本田旗下的ASIMO,成本也在300-400万美元的范围。去年一台没有上半身、被众多报道称离商业化不远的双足机器人Cassie进入视野,但该机器人的成本也高于10万美元,其制作公司Agility Robotics表示成本是制约双足机器人商业化的主要的因素。至于所谓的商业化也仅限高校实验室等科研机构。
目前足式机器人,尤其是人形机器人还存在诸多技术问题。据浙江大学控制学院机器人团队负责人、科技部智能机器人重点专项专家组专家熊蓉教授所述,当下的足式机器人其机构设计、驱动、能量消耗等等都是尚待完善的问题。以能耗为例,人类的能量消耗一般是0.01-0.2个能量单位,而足式机器人均在2以上。大量的能耗也就对航时产生了压力。
就拿波士顿动力的Handle与Atlas比较,轮腿式机器人Handle一次充电可以行走24km,最高时速可达14km/h,经计算航时约为1.7小时,而拥有相同上半身的人形机器人Altas的续航时间仅为1小时。因此在能量消耗方面,足式机器人还有待完善。目前延长续航时间的处理方法主要有提高电池容量、进行结构减重和改变驱动控制。
最后是资本的观望以及市场的缓慢增长,据人工智能信息服务平台因果树的多个方面数据显示,2018年前三季度有关机器人的创投项目分别有48个、55个和27个,其中B轮及以前轮次项目分别有35个、46个和23个,占比分别为72.92%、83.64%和85.19%,鲜有C轮、D轮和E轮项目。鲸准研究院的数据也验证了这一观点,截止目前的机器人项目中未融资、种子轮与天使轮的占比高达72.9%,2017年11月至2018年10月,投资事件个数趋势下降。可见机器人在产业生命周期中仍处于成长期,经营风险较高。


此外再单独考虑足式机器人,我们会发现2018年仅有优必选等屈指可数的几家公司获得融资,这体现了资本在足式机器人上的观望态度。高昂的成本与致命的能耗问题使投资者望而却步。一般说来,市场的开拓除了产品端切中客户的真实需求外,资本的炒作与推动也是重要一环。在投资者未将焦点置于足式机器人的当下,商业化进程确实任重而道远。
与此同时,在当下的应用场景中,无人机等智能硬件的加入会弥补部分足式机器人的市场空包,因此人们并不十分渴求足式机器人在短时间内的推广。
家庭、商场、教室等众多场景中,我们正真看到慢慢的变多的轮式、履带式机器人穿梭于其中。随机器人的加入,人们的生活正变得高效而智能。
既然轮式、履带式机器人的技术简单而成熟,应用的开发也日趋丰富,我们为什么还要花费如此多的人力、物力、财力去研究足式机器人呢?这其中自然有其不可不为的原因:
足式机器人相较于轮式、履带式机器人而言在运动灵活性和环境适应性方面有着显著优势。众所周知,轮式、履带式机器人在行动方面对于地面的要求是较为严格的,这就限制了其应用场景的延展。而在前进过程中,足式机器人采用离散的落脚点方式,能适应多变的地形,其多肢体、多自由度的设计可以使其根据作业要求「主动」调节身体高度,以保证身体的平衡稳定性。与此同时,当一个肢体在作业中出现故障问题,足式机器人依然能够继续运作,「容错性」高,而轮式、履带式机器人并不具备这一特性。
在功能上足式机器人具备多样性,以Altas为例,当场景中出现特殊需求时,Altas可以腾出手臂进行工作,而轮式、履带式机器人只能维持基本的平衡,在工作输出方面劣势明显。
足式机器人的市场更为广阔,更符合未来趋势。目前来看,物质运输、野外勘测、灾祸救援及部分高危环境作业都需要足式机器人的协助。此前日本福岛发生核泄漏事故后,人们曾尝试投入履带式机器人进行有关作业,但实际效果不佳,这让人们看到了轮式、履带式机器人在应用场景范围上的局限。
对于足式机器人的应用,中国人工智能学会理事长李德毅称该类机器人在人机交互和复杂地形的适应方面有天然优势。若能够解决好运动平衡问题,再用人工智能技术武装大脑,人形机器人将具备广阔的应用场景和巨大的商业经济价值。其应用场景不仅包括机场、酒店、养老等服务行业,高校教具、娱乐影视、军用装备等方面也会有用武之地。
在轮式、履带式机器人已开拓的应用场景中,足式机器人可提供更多服务,例如勘测业务方面,足式机器人将扩大基于平地进行的勘测范围,包括山地、楼梯等。此外,基于原有的应用场景范围,足式机器人的出现或许能够开拓新的应用领域,例如代替人类进行军事作战等。
在机器人产业化的早期阶段,多种产品形态并存,轮式、履带式机器人的低门槛成为当前众多厂家的选择理由。不过无论是科幻片中所描述的机器人,还是未来机器人的终极形态,足式机器人,尤其是人形机器人,都是大势所趋、众望所归。
1969年阿姆斯特朗在月球上的一小步成为人类探索星球的一大步,而今天Atlas的一小步会成为人类探索智能的一大步。SpotMini开启的也不仅是一扇普通的铁门,更是通向幸福生活的大门。只要我们坚定信仰,使用先进的技术为机器人赋能,相信人机共存、互利共生的盛世局面终将到来!返回搜狐,查看更加多


